



У сценаріях безпеки обладнання для спостереження часто піддається вітру - Індуковані коливання через довгу - відстань. Поки камера Широкий - кутовий режим демонструє мінімальну чутливість до зовнішніх порушень, Телефото режим Оптично посилюють механічні коливання, що призводить до значного розмивання зображення або навіть втрати цільового фокусу. Отже, Активні механізми стабілізації стали критичною технічною вимогою для тривалих - систем спостереження за діапазоном. Поточні технології стабілізації в першу чергу поділяються на дві категорії: Оптичне стабілізація зображення (OIS) і Електронна стабілізація зображення (EIS).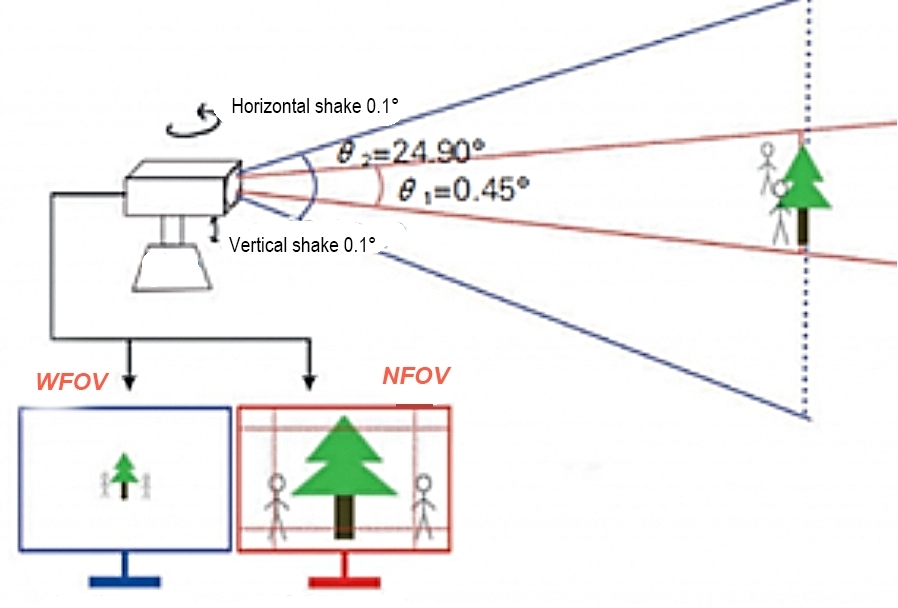
EIS використовує алгоритм обробки зображення - Алгоритм обробки для досягнення стабілізації зображення. Це вимагає збільшення поточного пострілу, що призвело до 10% - 20% втрати поля моніторингу погляду. В технології EIS об'єктив відповідає лише за придбання зображень. Після того, як датчик утворює зображення, спочатку він повинен бути стабілізованим зображенням за допомогою вбудованого алгоритму ядра процесора Цей тип стабілізації зображення повністю досягається за допомогою технології цифрової обробки, що знижує якість відео та має загальний ефект стабілізації. Він, як правило, використовується в низьких - кінцевих продуктах завдяки своїй переваги витрат.
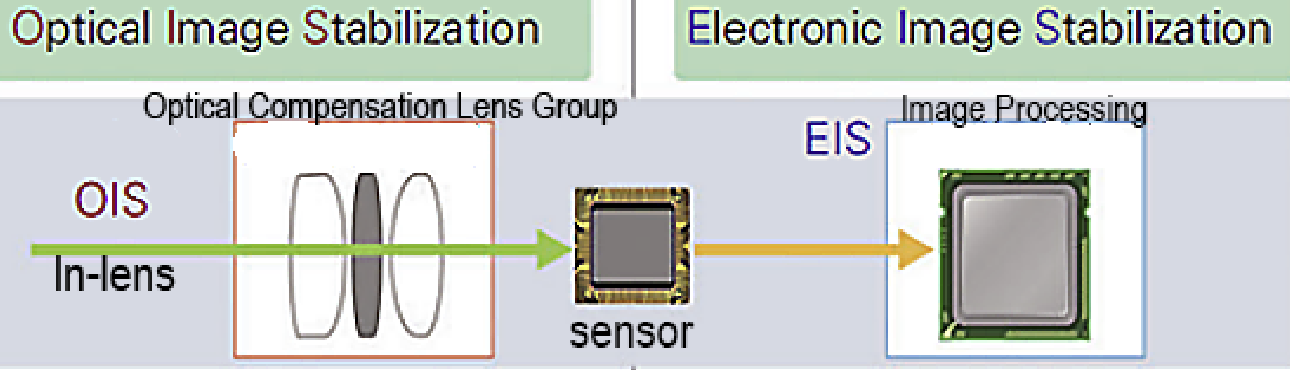
OIS використовує побудований - в гіроскопі в межах об'єктива для виявлення вібрацій камери. Гіроскоп перетворює дані механічного руху в електричні сигнали, передані контролеру OIS. Центральний блок обробки контролера негайно аналізує та обчислює переміщення або кут, який необхідно компенсувати об'єктив, і використовує електромагнітну силу, що генерується трьома наборами котушок і магнітів через привідний двигун, щоб точно керувати об'єктивом до нахилу, виправити оптичний шлях та уникати розмиття зображення, викликаного струсом. В оптичній конструкції, додавши рухомий об'єктив, зсув об'єктива контролюється на основі кількості тремтіння, компенсуючи оптичний шлях назад до стабільного стану.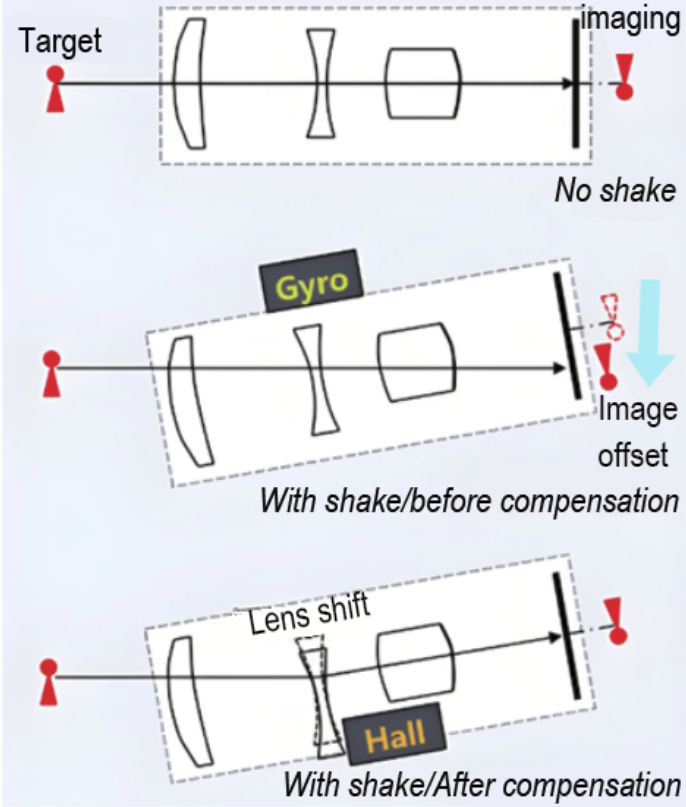
У межах кожного циклу експозиції ОІ повинні послідовно виконувати: виявлення вібрації, обробка сигналів та компенсаційна об'єктива. Весь процес - це рух сервоприводу, який також має характеристики короткого часу виявлення, швидкої швидкості обробки сигналів, руху компенсації малих лінз та приймає простий і відносно стабільний алгоритм управління PID.